
Publicerat: 2018-09-21
Spaning
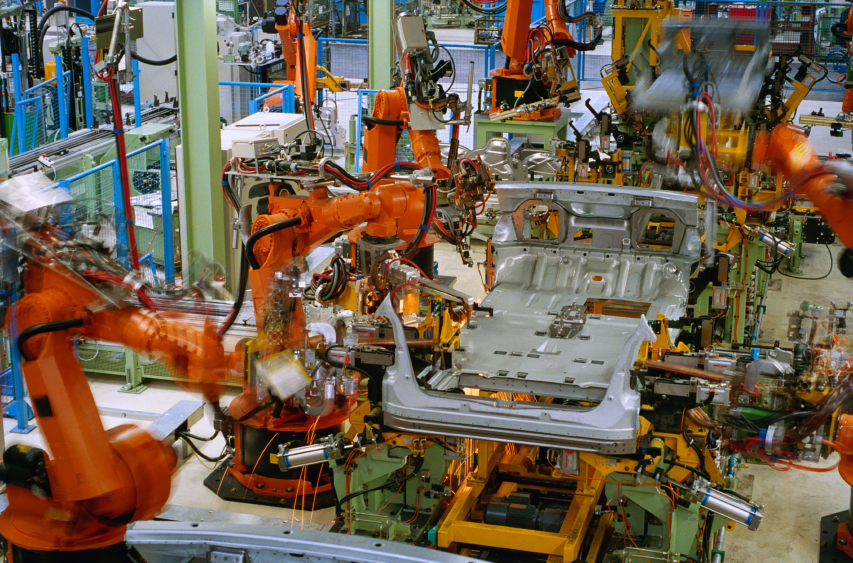
Skörda paprikor med robot

Vill du ha full tillgång till Sveriges störta trendsajt?
För att ta del av alla våra spännande spaningar och trendanalyser kan du prova tjänsten gratis under 1 vecka. Teckna ett provabonnemang här för omedelbar access.
Relaterade trender

Relaterade spaningar
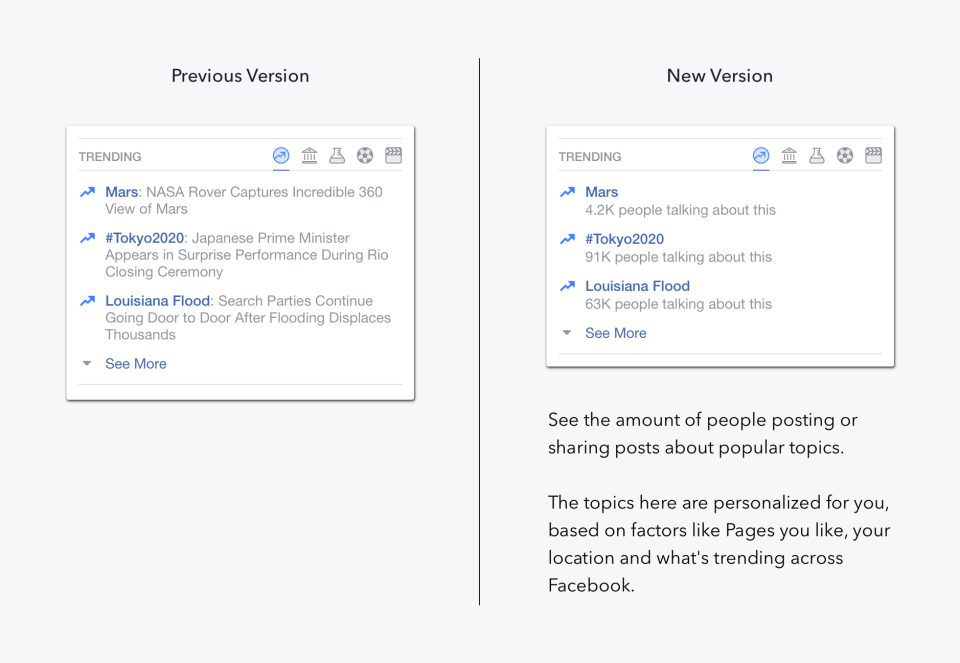
Facebook byter ut människor mot algoritmer
Facebook körde 2014 igång tjänsten Trending för att hjälpa sina använd...
Läs mer

Ökad användning i mobilnäten
Mobilnäten användes mer intensivt under första halvåret 2020. Datatraf...
Läs mer

Miljöskatt-ska ej drabba privatpersoner
En studie från Göteborgs universitet har gjort en undersökning hur oli...
Läs mer

Svenskarnas digitala liv under pandemin
Hur har coronapandemin påverkat våra liv och våra digitala beteenden?...
Läs mer

SL ersätter konduktörer med kontrollstolpar
Ett tecken i tiden gällande automatiseringstrenden kan upplevas i prak...
Läs mer